
起源の場所:
中国
ブランド名:
YOUNGYOU
証明:
CE
モデル番号:
WPDC5
接触米国
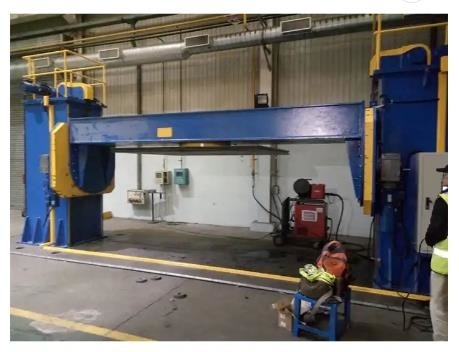





溶接のためのポジシァヨナーによって溶接する自動溶接のポジシァヨナーのロボット腕
製品紹介
私達の二重コラムの溶接のポジシァヨナーはあり、回転と、持ち上がること傾く基礎移動functionPLCの制御システムは同期に高精度に持ち上がることを制御できる。コラムの1つは柵でthatcan溶接の溶接の効率そして質を改善するために自動溶接の中心を非常に結合するために横のbeam.itを取った後溶接のマニピュレーターのコラム ブームと移動可能な1のそれであるためにbedesigned動くことができる作動できるできる。Ltはboilers.petrochemical、造船業、自動車、鋼鉄およびずっと他の多くの企業で広く利用されている。、作動すること容易なful特色にされたisadvanced、装置構造適用範囲が広い制御は理想的な装置を達成するために溶接のandweldingオートメーションの質を改善することである。二重コラムの溶接のポジシァヨナーのほかに、私達にまたLタイプ溶接のポジシァヨナー、頭部およびtailweldingポジシァヨナー、Cのタイプ溶接のポジシァヨナー等がある。私達は別の工作物かプロセス条件に一致する別の溶接のポジシァヨナーを設計してもいい。
あなたのための最も適したロボットによって助けられるロケータを選ぶ方法
ロボットによって助けられるロケータを選んだ場合、あなたの適用状態に基づいて最もよい判断をする必要がある。そして次のポイントを考慮する必要がある:
どの位スペースが必要ロボットおよびロケータを収容するためにであるか。
工作物の幾何学的な構造は何であるか。
それらの工作物は各々の個々のロケータのために余りに大きくまたは重いか。
どのロケータ最も適度であるか。
最大負荷の性能要件は何であるか。
最もよくこれらのポイントに基づいてあなたの必要性を満たすロケータを定めたらさまざまな製造業者のプロダクトからの適したモデルを捜すことができる。

会社について
私達のガイド・レールはABB KUKA FANUC Yaskawa URのような多くの国際的な有名なロボット ブランドに、協力した。含まれる会社は主にパレットで運搬すること、負荷および荷を下すことを含んでいる。500kgからの5000kgへのガイド・レールの範囲の負荷。ガイド・レールの長さは顧客の必要性に従ってカスタマイズされる。私達はABB IRB6700のロボットが20台のCNC機械に対応し、50m長いガイド・レールがロボットの荷を積み、荷を下す交換動きを完了すること場合を作った。ロボットの数は非常に減り、統合の費用は救われる。
私達の会社はまた非常に好ましい価格で低価格に順序を一緒に置くために工業用ロボットを提供する。
上海、中国へようこそ、私達のロボットおよび柵を調査するため!
会社プロダクト供給
ABBのロボット
KUKAのロボット
Yaskawaのロボット
Fanucのロボット
URのロボット
Cobot
ガイド・レール
Cobot中国製
製品仕様書
プロダクト パラメータ テーブル
包装および交通機関
![]()
![]()
私達にあなたの照会を直接送りなさい



