
起源の場所:
中国
ブランド名:
YOUNGYOU
証明:
CE
モデル番号:
SZGH-H1500-B-6
接触米国




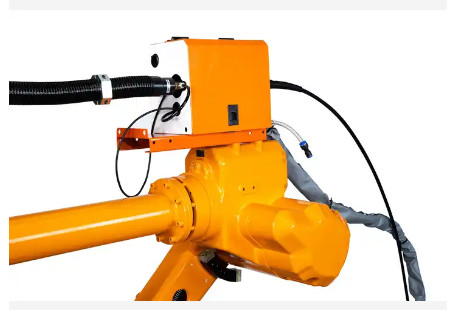
ロボット腕の溶接機のポジシァヨナーが付いている自動6つの軸線レーザーの産業ロボティック溶接工の腕
移動ロボットのための視覚運行および位置の技術
視覚運行および位置方式では、国内外で最も一般的な運行方法はロボットに車を取付けたカメラを取付けるローカル視野に基づいている。この運行方法では、制御装置および感知装置はロボット ボディで荷を積まれ、イメージの認識および道の計画のような高レベル決定は機内制御計算機によって完了する。
視覚運行および位置方式は主にカメラ(またはCCDのイメージ センサー)、映像信号のデジタル化装置、DSPに、コンピュータおよびペリフェラル基づいて、速いプロセッサ信号命令等含んでいる。多くのロボット システムは今基本的なコンポーネントがケイ素 イメージ投射要素の列であるCCDのイメージ センサーを使用する。感光性要素および電荷転送素子は基質で形成され、充満の順次移動によって、多数ピクセルの映像信号は時間および順に取られる。例えば、配列CCDセンサーによって集められるイメージの決断は32 × × 1024ピクセル、等32から1024ある場合もある。
視覚運行および位置方式の働く原則はロボットの周囲の環境の光学処理を行うこと単にである。最初に、カメラがイメージ情報を集めるのに使用され集められた情報を圧縮し、そして次にニューラル・ネットワークおよび統計的な方法で構成される学習サブシステムに戻って与える。学習サブシステムは完全なロボットの実際の位置とそれから集められたイメージ情報をロボットの自治運行および位置機能接続する。
![]()
会社について
私達のガイド・レールはABB KUKA FANUC Yaskawa URのような多くの国際的な有名なロボット ブランドに、協力した。含まれる会社は主にパレットで運搬すること、負荷および荷を下すことを含んでいる。500kgからの5000kgへのガイド・レールの範囲の負荷。ガイド・レールの長さは顧客の必要性に従ってカスタマイズされる。私達はABB IRB6700のロボットが20台のCNC機械に対応し、50m長いガイド・レールがロボットの荷を積み、荷を下す交換動きを完了すること場合を作った。ロボットの数は非常に減り、統合の費用は救われる。
私達の会社はまた非常に好ましい価格で低価格に順序を一緒に置くために工業用ロボットを提供する。
上海、中国へようこそ、私達のロボットおよび柵を調査するため!
会社プロダクト供給
ABBのロボット
KUKAのロボット
Yaskawaのロボット
Fanucのロボット
URのロボット
Cobot
ガイド・レール
Cobot中国製
製品仕様書
プロダクト パラメータ テーブル
![]()
包装および交通機関
![]()
![]()
私達にあなたの照会を直接送りなさい

