
起源の場所:
中国
ブランド名:
YOUNGYOU
証明:
CE
モデル番号:
GBS6-C1400
接触米国

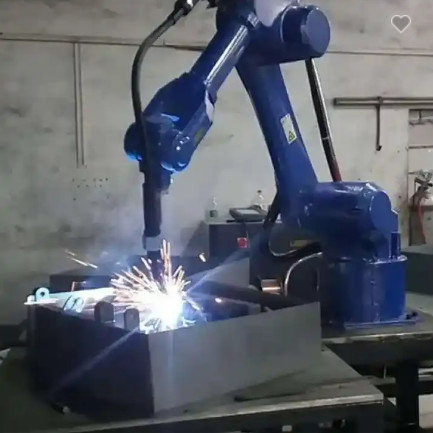



CHD MIG 500の電気溶接機および溶接のポジシァヨナーが付いている6つの軸線の自動溶接のロボット
移動ロボットのための超音波運行および位置の技術
超音波運行および位置の働く原則はレーザーおよび赤外線のそれにまた類似している。通常、超音波は超音波センサーの放出調査、および媒体の超音波の遭遇の障害によっておよび受信側デバイスに戻るために出る。
自分自身によって出る超音波反射信号を受け取り、超音波放出とエコーの受信間の時差に、また伝播の速度基づいて計算することによって、伝播の間隔Sを障害からのロボットへの間隔は得ることができる。方式がある:S=Tv/2、T -超音波放出間の時差および受信;V -媒体で広がる超音波の速度。
当然、また多くの移動ロボットの運行そしてあり別の送信し、受信側デバイスを使用する技術を置く。多数の受信側デバイスは環境の地図で送信の調査は移動ロボットで取付けられているが、整理される。
超音波センサーの固有の欠陥に、ミラー反射および限られたビーム角のようなよる移動ロボットの運行そして位置で十分に周囲の環境情報を得ることは困難である。従って対応する環境モデルを確立するのに、多数センサーで構成される超音波感知システムが通常使用されセンサーによって収集情報シリアル通信によって移動ロボットの制御システムに送信されるロボットの位置の環境情報を得る、制御システムはそれから集められた信号および確立された数理モデルに基づいて対応するデータを処理するのにある特定のアルゴリズムを使用する。
安価、速い情報収集率および高い間隔の決断の利点が原因で、超音波センサーは長くずっと移動ロボットの運行そして位置で広く利用されている。さらに、それは環境情報を、速い及ぶ速度およびよい実時間性能に終って集めるとき複雑なイメージ装置の技術を要求しない。
同時に、超音波センサーはまた天候状態、包囲されたライト、障害影および表面の粗さのような外的な環境条件により少なく敏感である。超音波の運行および位置はずっと移動ロボットのさまざまな認識システムで広く利用されている。
![]()
会社について
私達のガイド・レールはABB KUKA FANUC Yaskawa URのような多くの国際的な有名なロボット ブランドに、協力した。含まれる会社は主にパレットで運搬すること、負荷および荷を下すことを含んでいる。500kgからの5000kgへのガイド・レールの範囲の負荷。ガイド・レールの長さは顧客の必要性に従ってカスタマイズされる。私達はABB IRB6700のロボットが20台のCNC機械に対応し、50m長いガイド・レールがロボットの荷を積み、荷を下す交換動きを完了すること場合を作った。ロボットの数は非常に減り、統合の費用は救われる。
私達の会社はまた非常に好ましい価格で低価格に順序を一緒に置くために工業用ロボットを提供する。
上海、中国へようこそ、私達のロボットおよび柵を調査するため!
会社プロダクト供給
ABBのロボット
KUKAのロボット
Yaskawaのロボット
Fanucのロボット
URのロボット
Cobot
ガイド・レール
Cobot中国製
製品仕様書
プロダクト パラメータ テーブル
![]()
![]()
![]()
![]()
包装および交通機関
![]()
![]()
私達にあなたの照会を直接送りなさい

