
起源の場所:
中国
ブランド名:
YOUNGYOU
証明:
CE
モデル番号:
PY4030U-050
接触米国
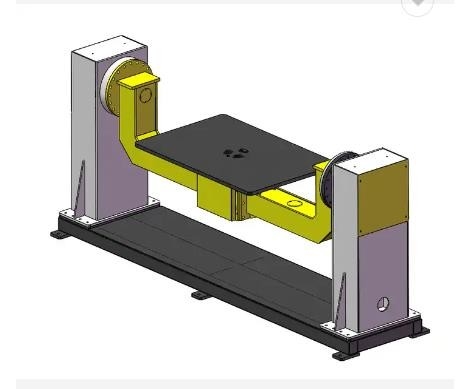




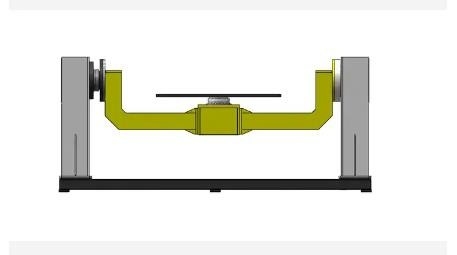
中国製1200*1200回転盤380v 50-60hzの軸線の負荷100-1000kg二軸の溶接のポジシァヨナー
移動ロボットのための軽い反射の運行そして位置の技術
方法を置く典型的で軽い反射の運行は及ぶことのために主にレーザーか赤外線センサーを使用する。レーザーおよび赤外線軽い反射の技術を運行および位置のために使用するため両方。
レーザーのグローバルな配置方法はレーザーの回転メカニズム、反射器、光電子工学の受信側デバイスおよびデータ収集および伝動装置から一般に成っている。
操作の間に、レーザーは回転ミラーのメカニズムを通して外側に出る。後方の反射器で構成される協力的な陸標をスキャンするとき反射光は検出信号として光電受信機によって処理される。データ処理のためのデータ収集 プログラムはメカニズム回転(ターゲットの測定された角度の価値)のコード ディスク データを読むために開始し次に上部コンピュータにコミュニケーションによって送信される。陸標および検出された情報の知られていた位置に基づいて、陸標の座標系のセンサーの現在位置そして方向はそれ以上の運行および位置を達成するために計算することができる。
レーザーの及ぶことに及ぶ方向で狭いビーム、よい平行、小さい分散の利点が、高リゾリューションありが、また環境要因によって非常に影響される。従っていかにdenoiseへ集められた信号がまたレーザーの及ぶことを使用する場合の主要な挑戦であるか。さらに、また及ぶレーザーは運行を達成することも困難にし、レーザーによってもっぱら置く盲点を備えている。産業適用では、一般に、それはパイプラインのひびの検出のような特定の範囲内の産業現地のテストでまだ広く利用されている。
赤外線感知の技術は多共同ロボット障害回避システムで頻繁に使用されるロボット腕の表面をカバーし、操作の間にロボット腕によって見つけられるさまざまな目的を検出できるロボット「敏感な皮」の大きい区域を形作るために。
典型的な赤外線センサーは赤外線ライトおよび受信機として役立つソリッド ステート感光性ダイオードを出すことができるソリッド ステート発光ダイオードを含んでいる。調整された信号は赤外線発光管によって出、赤外線感光性管はターゲットによって反映される赤外線調整された信号を受け取る。環境の赤外線干渉の除去は信号調節および熱心な赤外線フィルターによって保障される。出力信号VOが反射光の強度の電圧出力を表せば、VOは調査と工作物間の間隔の機能である:pが工作物の反射率であるところ、Vo=f (xのp)。Pはターゲット目的の表面色そして荒さと関連している。X -調査と工作物間の間隔。
工作物が同じp価値の同じタイプのターゲットのとき、xおよびVOは1対1対応する。Xはさまざまなターゲット目的の近さの測定の実験データの挿入によって得ることができる。このように、ロボットとターゲット目的間の間隔は赤外線センサーを使用して測定し移動ロボットを運行し、取付けるのにまた他の情報処理方法が使用することができる。
また赤外線感知の位置に高い感受性、単純構造および高角の決断および低い間隔の決断による安価のような利点があるがロボットの緊急の停止を促進する近づくか、または突然の動きの障害を検出するために移動ロボットの近接センサーとして一般的である。
![]()
会社について
私達のガイド・レールはABB KUKA FANUC Yaskawa URのような多くの国際的な有名なロボット ブランドに、協力した。含まれる会社は主にパレットで運搬すること、負荷および荷を下すことを含んでいる。500kgからの5000kgへのガイド・レールの範囲の負荷。ガイド・レールの長さは顧客の必要性に従ってカスタマイズされる。私達はABB IRB6700のロボットが20台のCNC機械に対応し、50m長いガイド・レールがロボットの荷を積み、荷を下す交換動きを完了すること場合を作った。ロボットの数は非常に減り、統合の費用は救われる。
私達の会社はまた非常に好ましい価格で低価格に順序を一緒に置くために工業用ロボットを提供する。
上海、中国へようこそ、私達のロボットおよび柵を調査するため!
会社プロダクト供給
ABBのロボット
KUKAのロボット
Yaskawaのロボット
Fanucのロボット
URのロボット
Cobot
ガイド・レール
Cobot中国製
製品仕様書
プロダクト パラメータ テーブル


包装および交通機関
![]()
![]()
私達にあなたの照会を直接送りなさい




