

2023-07-12
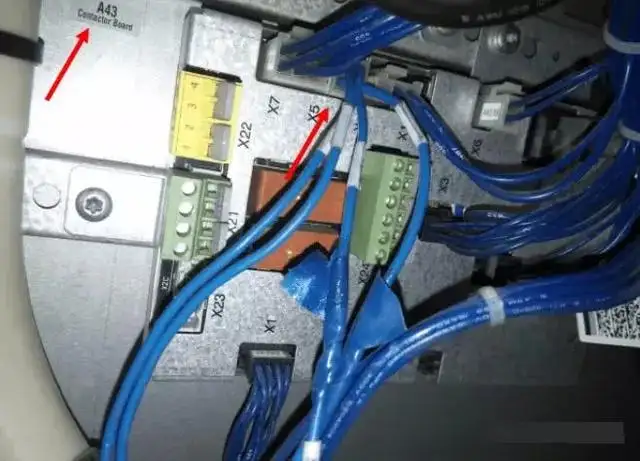
2. ABBのロボット力モジュールの短絡板の短絡の欠陥の処理
ヒューマン・ファクター:ホット スワップ ハードウェアは非常に危なく、多くのサーキット ボードの失敗はホット スワップによって引き起こされる。力のカードそしてプラグを挿入するとき不適当な武力の行使はロボット サーキット ボードに傷つくためにインターフェイス、導く破片、等への損害を与えることができる;ロボット増加の使用の時、ロボット サーキット ボードの部品が自然に老化するので、ロボット サーキット ボードの失敗に導く。
環境要因:オペレータによって不適当な維持が原因で、ロボット サーキット ボードは信号の短絡を引き起こすことができる塵でカバーされる。
3. バックアップ工業用ロボットに必要なそれがいつあるか
新しい機械の最初の力の後。
修正前。
3。修正を完了した後。
4。工業用ロボットが重要なら、定期的に週に一度されるべきである。
5。USBドライブでバックアップを同様に作ることが最善である。
6.規則的にハード・ドライブ スペースを自由に使えるようにするために古いバックアップを削除しなさい。
4. 方法ロボットが始動するおよび教授のペンダントを扱う次のインターフェイスを表示し続ける状態
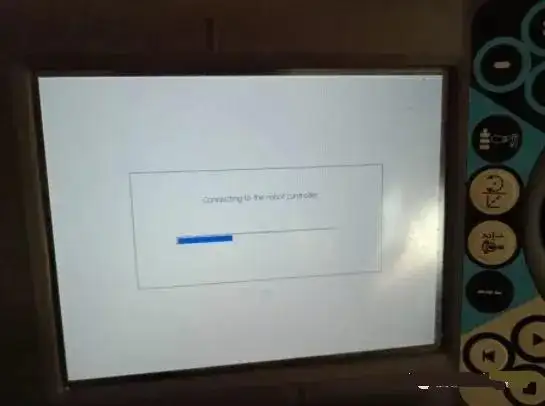 上記の状態はロボットの教授のペンダントと主要なコントローラーの間に確立されるコミュニケーション関係がないおよび関係を確立しないための理由ことである下記のものを含むために:
上記の状態はロボットの教授のペンダントと主要なコントローラーの間に確立されるコミュニケーション関係がないおよび関係を確立しないための理由ことである下記のものを含むために:
1。ロボット ホストは不良である。
2。ロボット ホストの作り付けのCFカード(SDカード)は不良である。
3。教授のペンダントとホスト間のネットワーク ケーブルは緩い、等である。
処理方法:1。ホストが正常であるかどうか、そしてホストのSDカードが正常であるかどうか確認しなさい。
2。教授のペンダントからのホストへのネットワーク ケーブルがきちんと接続されるかどうか確認しなさい。
5. ロボットがアラーム・メッセージを表示するとき10106保全時間のメモの意味は何であるか。
この状態はABBのロボット理性的な定期保守のメモである。
6. ロボットが力の状態を書き入れる場合のシステム機能不全を扱う方法か。
1. ロボットを一度再始動しなさい。
そうでなかったら、より詳しい警報プロンプトがあるように教授のペンダントを処置をとるために確認すれば。
3.再始動。
4。それがそれでも解放することができなければ試みBの開始。
5。それがそれでも働かなかったら、Pの開始を試みなさい。
6。それがそれでも働かなかったら、私を開始裁判にかけなさい(これは工場設定にロボットを戻したり、注意する)。
7. ロボット バックアップは多数のロボットによって共有することができるか。
例えばNO、ロボットAのバックアップはロボットBかCのロボットAにこれによりシステム故障を引き起こすことができると同時にしか、ない使用することができない。
8. ロボット バックアップでどんなファイルが共有することができるか。
2台のロボットが同じモデルおよび構成なら。急速なプログラムおよびEIOファイルを共有できるが共有の後で、普通使用することができる前にまた確認される必要がある。
9. ロボットの機械起源は何であるか。機械起源はどこにあるか。
ロボットの6つのサーボ モーターのそれぞれに独特な固定機械起源がある。ロボットの機械起源の不正確な設定は直線で歩くロボットへのロボット、無力および重大な損傷の限られたか不正確な動きのような問題を起こす。
10. ロボット50204の行為の監視警報を取り除く方法か。
1. 実際の状態に一致させるために変数を監察するロボット行為を(コントロール パネルの行為の監視メニューで)変更しなさい。
2。ロボットの加速を減らすAccSet命令を使用しなさい。
3.速度のdata_のvを腐敗選択減らしなさい。
11. ロボットはじめて動力を与えられる時警報「50296扱う方法SMBの記憶データ相違」をか。
1. ABBのメイン メニューからの選り抜き口径測定。
2. ROB_ 1.を入れる口径測定スクリーンおよび選り抜きSMBの記憶をかちりと鳴らしなさい。
3.選り抜き「高度は」、「明確な制御キャビネットの記憶」を入れ、かちりと鳴らす。
4。完了の後で、「近い」かちりと鳴らし、次に「更新」をかちりと鳴らしなさい。
5.選り抜き『SMBの記憶データの制御キャビネットを』更新する交換された制御キャビネットかロボティック腕。
12. 急速なプログラムのロボット弾道の動きの速度をカスタマイズする方法か。
1. 教授のペンダントのメイン メニューからの選り抜きプログラム データ。
2。データ タイプSpeeddataを見つけた後、新しいかちりと鳴らしなさい。
3.初期値をつければ、4つの変数Speeddataの意味は次のとおりである:v_ TCPはロボット、v_の腐敗の線形連続した速度を表すロボット、v_ Leaxの回転速度を表す外的な軸線、v_ Reaxの線形規定回転数を表す外的な軸線の回転速度を表す。外的な軸線がなければ、最後の2つは変更される必要はない。
4。カスタマイズされたデータは急速なプログラムで呼ぶことができる。
13. ABBのロボット サーボ モーター修理の6つの共通の欠陥の修理
1. 高速回転の間にモーター エラー カウンタのオーバーフロー・エラーを扱う方法か。
モーター エラー カウンタの流出の欠陥は高速回転の間に起こる。
対策1:モーター送電線およびエンコーダー ケーブルの配線が正しいかどうか、そしてケーブルは傷つくかどうか確認しなさい。
モーター エラー カウンタの流出の欠陥は長い命令脈拍を入れると起こる。
モーター エラー カウンタの流出の欠陥は操作の間に起こった。
対策2:エラー カウンタの流出のレベルの設定値を増加しなさい;回転速度を減速しなさい;加速および減速時間を拡張しなさい;負荷は余りにも重く、大きい容量モーターを全く最初から選ぶか、または負荷を減らすことは必要で負荷を高めるために減力剤のような伝達組織を取付ける。
2。パルス出力機構があると働かなければ何がされるべきであるか。
コントローラーのパルス出力機構の現在の値を指示し、パルス出力機構 ライトが点滅しているかどうか、命令脈拍が普通達成され、今出力していることを認めなさい;
コントローラーからの運転者への制御ケーブル、送電線およびエンコーダー ケーブルが、または悪い接触で傷つけられて不正確にワイヤーで縛られるかどうか確認しなさい;
ブレーキが付いているサーボ モーターのブレーキが今開いてしまったかどうか確認しなさい;
サーボ運転者のパネルが脈拍命令の入力を認めるかどうか指示しなさい;
動かされた操作命令は正常である;
制御形態は方向制御の形態を選ばなければならない;
命令脈拍の設定に一貫したサーボ運転者によって置かれる入力パルスのタイプはある;
ことをエラー カウンタ再調節された信号は入らないことをドライブが停止する肯定的な回転側面、回転側面ドライブ停止信号確認し、負荷は切られ、正価格販売操作は正常である。機械システムを点検しなさい。
3。私は何を負荷との積み過ぎのレポートがなければするべきであるか。
サーボ動かされた信号がおよび接続されるときそれが起これば脈拍は出ない:
悪い接触またはケーブルの損傷があるかどうかサーボ モーターの送電線の配線を確認しなさい;それがブレーキが付いているサーボ モーターなら、ブレーキはつかなければならない;速度のループの利益は置いた余りに高くある;速度のループの積分時間の定数は置いた余りに小さくある。
操作の間のサーボ唯一の機能不全:
方位角回路の利益は置いた余りに高くある;完了の位置の広さは置いた余りに小さくある;サーボ モーター シャフトにロックされた回転子がない確認し、機械類をかどうか全く最初から調節しなさい。
4。操作の間に異常な音か振動を取扱う方法か。
サーボ配線:
損傷があるかどうか点検するのに標準化された送電線、エンコーダー ケーブル、制御ケーブルおよびケーブルを使用しなさい;干渉の源が管理線の近くにあるかどうか、そしてそれらは近くの高い現在の送電線に平行または余りに近いかどうか確認しなさい;優秀な基づいていることを保障するアース端子の潜在性に変更があるかどうか確認しなさい。
サーボ変数:
サーボ利益設定は余りに大きく、それは手動でにまたは積極的に全く最初から調節するサーボ変数を推薦される;0の初期値の速度の応答フィルターの時定数の設定を、認めて、テストによって設定値を増加することは可能である;電子ギヤ比率の設定は余りにも大きく、工場設定に元通りになるには支持する;ノッチ フィルター頻度および広さをテストし、調節するサーボ・システムと機械システム間の共鳴。
機械システム:
モーター シャフトおよび装置システムを接続するカップリングは逸脱し、設置ねじはきつく締められなかった;滑車またはギヤの悪い約束はまた負荷トルクの変更をもたらす場合がある。テスト正価格販売操作。正価格販売なら操作は機械システムの接着の部分に異常があれば正常、点検である;負荷を減らすか、または大きい容量と運転者およびモーターを取り替えなさい、そして正価格販売操作が正常、かどうか負荷慣性、トルクおよび速度余りに大きい、テスト正価格販売操作是認しなさい。
5。ABBのロボット サーボ モーター修理の間の不正確なオリエンテーション制御そして位置を扱う方法か。
コントローラーの実際の宣言された脈拍の価値が期待された価値に一貫している、そうでなかったら、プログラムを点検し、訂正しなさい初めにかどうか、認めれば;
サーボ運転者によって受け取られる脈拍命令の数がコントローラーが発表する1つに一致させるかどうか指示しなさい。そうでなかったら、制御ケーブルを点検しなさい;サーボ命令脈拍の形態の設定がCW/CCWまたはpulse+directionのようなコントローラーの設定に一貫している、かどうか確認しなさい;
サーボ利益設定は余りに大きかったり、手動でまたは積極的にサーボ利益を全く最初から調節する;サーボ モーターは交換動きの間に集められた間違いに傾向がある。間違いが許可されたスケールを超過する前にプロセスによって許可される条件の下で機械起源信号を置くことを推薦し起源の探査業務を行う;機械システム自体に低い正確さか異常な伝達構成がある(サーボ モーターと装置システム間のカップリングの偏差のような)。
6. ABBのロボット サーボ モーター修理、方向制御操作、超過速度欠陥は報告した。それを扱う方法か。
サーボ動かされた信号は接続されるとすぐ、誘発する:サーボ モーター送電線およびエンコーダー ケーブルの配線が正しく、無傷であるかどうか確認しなさい。
14. いかにABBの工業用ロボットを経る定期整備をするか。
「ブレーキ点検」の正常運営の前に、各軸線のモーター ブレーキを点検することは必要である。モーター ブレーキのための点検方法は次の通りある:
1.操業最大負荷の位置への各々のロボティック腕の軸線。
2.回転モーター モード切り替えのつけモーター オフの位置へのロボット コントローラー。
3。シャフトが通常位置にあるかどうか確認しなさい。モーターは消えた後メカニカル・アームがそれでも位置を維持すれば、ブレーキが良好であることを示す。
損失の減速操作(250mm/s)機能の危険
コンピュータか教授のペンダントからギヤ比率か他の動き変数を変えてはいけない。これは減速操作(250mm/s)機能に影響を与える。
15. 教育用具を安全に使用した場合注意をに払う複数のポイント:
教授のペンダントに取付けられている可能になる装置ボタンはモードのモーターに中途半端に押されたとき、システムを変える。ボタンが解放されるか、または十分に押される時、モードを離れたモーターへのシステム変更。
16. 教育用具を安全に使用するためには、次の主義は続かれなければならない:
1.Whenはプログラムするか、またはデバッギングの間に可能になる装置ボタン機能を失うことができないしロボットはすぐに可能になる装置ボタンを解放するために動く必要はない。
2。プログラミングの人員が安全な区域に入るとき、他がロボットを動かすことを防ぐために彼らのボディの教授のペンダントを常に運ばなければならない。
17. ロボティック腕の働く範囲の内で働いた場合、次のポイントは観察されなければならない:
1. モード切り替え スイッチは手動位置にコンピュータを切るか、または遠隔に作動するために可能になる装置を作動させるためにコントローラー始動しなければならない;
2。モード切り替え スイッチがついている時
3.毛か衣類が混合されて得る時ロボティック腕の回転軸線への注意、注意するため。また、他の指定部品への注意かロボティック腕の装置;
4。各軸線のモーター ブレーキを点検しなさい。
18. 接触偏差
現象1:指によって触れられる位置はマウスの矢と一致しない。
理由:運転者プログラムを取付けた後、教授のペンダントは口径測定の間に縦に中心点の位置の中心に触れなかった。
解決:位置を再測定しなさい。
現象2:他に連絡する偏差があるが、ある区域に正確な接触がある。
原因:多量の塵かスケールは音響信号の伝達に影響を与える表面の音波のタッチ画面のまわりで音響の反射の縞で集まる。
解決:タッチ画面の音波の反射の縞をあらゆる面できれいにすることに特別な関心を払うタッチ画面をきれいにしなさい。きれいになった場合、タッチ画面の制御カードの電源を切りなさい。
19. 教授の吊り下げ式の接触無応答
現象:スクリーンに触れるとき、マウスの矢は動かないし、位置に変更がない。
理由:次の通り、この現象の多くの理由がある:
1。表面の音波のタッチ画面のまわりで音響の反射の縞で集まった塵かスケールはである非常に深刻、働かないことをタッチ画面をもたらして;
2.タッチ画面の機能不全;
3。タッチ画面の制御カードは故障していた;
4。タッチ画面信号ラインは故障していた;
5。ホストの機能不全のシリアル ポート;
6。教授のペンダントのオペレーティング システムは故障していた;
7.タッチ画面の運転者の設置間違い。
解決:通常の状況で規則的に点滅する毎秒タッチ画面信号の表示燈をおよそ一度観察しなさい。
スクリーンに触れるとき、複雑な問題である教授のペンダントは黒く行く。バックライトの省エネが置かれれば、黒いスクリーンは正常である;システム制御区域の第2単語が偶然作動すれば、スクリーンはまた黒く行く。最初の2ポイントが除かれれば、検討のための最も最近のファームウェアへの更新。
私達にあなたの照会を直接送りなさい

